ОСВОЕНИЕ
ЛУНЫ
ЛУНЫ
Определены, какие модели роботов будут необходимы для выполнения разных видов работ.
В данном проекте представлен подготовительный план освоения Луны
Описаны оптимальные и энергоемкие средства доставки грузов массой 22, 1010 и 1515 т до выбранного места прилунения около базы.
1
2
3
Союз Печатников
школа №309
Освоение Луны или уроки настоящего
о
Р
и
с
л
я
с
а
С
Р
Р
2
и
Р
2
5
д
в
Ф
в
и
Р
С
Р
2
и
Р
2
5
в
и
С
Р
2
и
Р
2
5
в
и
С
Р
д
в
Р
л
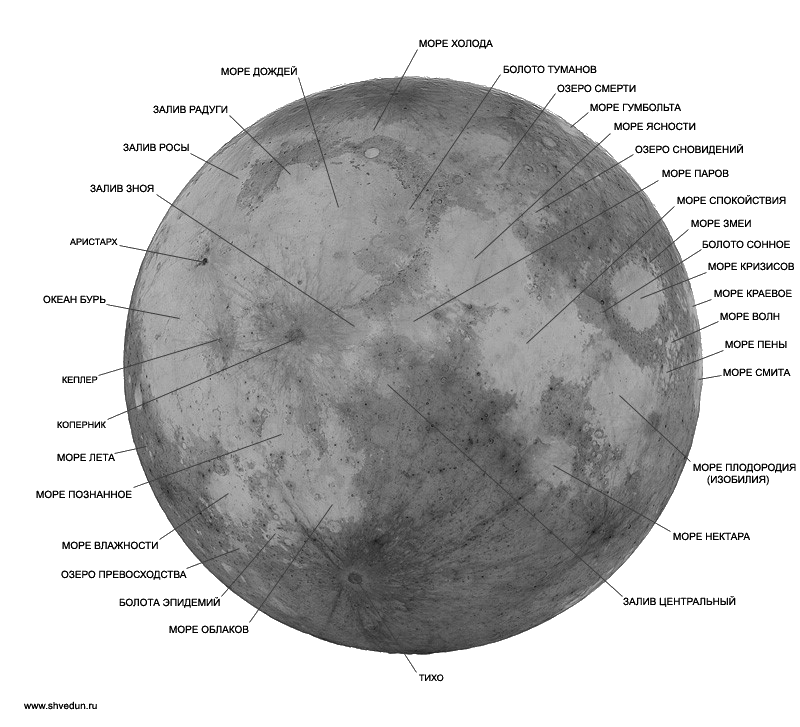
Где будем прилуняться?
Если посмотреть на карту становится ясно, что наибольшее число удачных посадок удалось осуществить в Северо-Восточной части Луны (Море Спокойствия, Море Изобилия, Море Кризисов).
Стоит отметить, что именно во время прилунения в море Спокойствия человек впервые ступил на Луну.
При выборе места для построения лунной базы нужно учитывать не только опыт прошлых лет, но и необходимые для существования станции условия. Одним из таких является солнечное освещение (можно пользоваться энергией Солнца с помощью фотогальванических панелей). Наилучшими условиями освещенности на лунных полюсах обладают отдельные участки валов наиболее крупных кратеров. С них практически все время видно Солнце, что делает их идеальным местом для размещения электростанций. Участки же, показанные на карте темным цветом, не освещаются никогда — по крайней мере, в нашу историческую эпоху. Именно там и нужно искать запасы водяного льда.
При выборе места для построения лунной базы нужно учитывать не только опыт прошлых лет, но и необходимые для существования станции условия. Одним из таких является солнечное освещение (можно пользоваться энергией Солнца с помощью фотогальванических панелей). Наилучшими условиями освещенности на лунных полюсах обладают отдельные участки валов наиболее крупных кратеров. С них практически все время видно Солнце, что делает их идеальным местом для размещения электростанций. Участки же, показанные на карте темным цветом, не освещаются никогда — по крайней мере, в нашу историческую эпоху. Именно там и нужно искать запасы водяного льда.
Если посмотреть на карту, то можно увидеть что наиболее крупными являются кратер Тихо и Залив Радуги (который вдобавок располагается в Северной части Луны, где было совершено наибольшее количество удачных прилунений).
Итог: самые приоритетные места для прилунения и построения лунной базы - это Море Спокойствия, Океан Бурь и Залив Радуги.
С
Р
и
Ф
2
у
в
и
и
Р
С
Р
2
и
Р
2
5
в
и
у
С
Р
2
и
Р
2
5
в
и
у
С
с
2
и
к
1
о
р
с
с
Ф
2
р
у
С
и
1
р
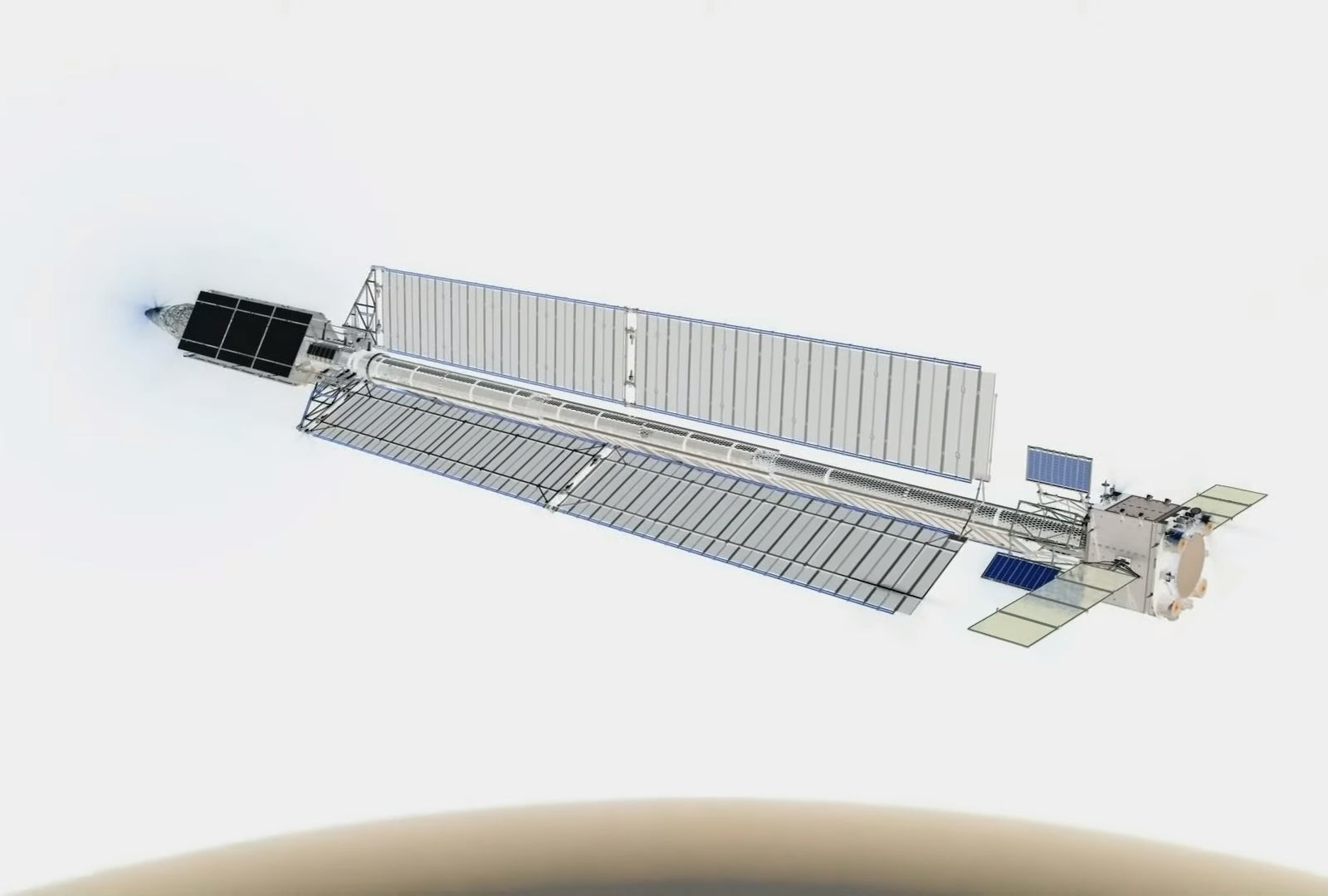
В качестве средства доставок грузов на Луну будет использоваться космический буксир «Зевс». Этот аппарат планирует получить Роскосмос. Доставку грузов непосредственно на поверхность Луны может осуществлять «Корверт». Этот аппарат будет совершать полёт на околодунной орбите. Он будет доставлять грузы с борта лунного грузового корабля в район расположения космонавтов.
Как доставить груз?
изображение взято из сети Интернет
С
я
2
0
Р
2
1
о
и
С
и
С
Р
и
С
К
С
О
О
м
С
К
О
О
м

Работы на Луне. Биобот. Разгрузка. Доставка
Для выполнения разгрузки/доставки указанных масс груза от места прилунения до Лунной Базы:
Каждого астронавта будет сопровождать «Биобот», который будет транспортировать их систему жизнеобеспечения и расходные материалы, удлиненную катушку для шлангокабеля и шлангокабеля, а также роботизированные системы, способные контролировать положение и движение шлангокабеля. Космонавт будет подключен к роботу через шлангокабель, несущие только небольшую аварийную систему жизнеобеспечения с открытым контуром, аналогичную тем, которые содержатся в каждом PLSS. Роботизированная мобильная база будет спроектирована так, чтобы иметь возможность путешествовать везде, где может идти космонавт, а также будет полезна в качестве транспорта для инструментов EVA, научной аппаратуры и собранных образцов, а также, возможно, для перевозки астронавта на маршрутах. Такая система также будет значительным улучшением участия общественности в этих будущих исследовательских миссиях, поскольку роботизированные транспортные средства могут иметь камеры с высоким разрешением и средства связи с высокой пропускной способностью, чтобы обеспечить видеосъемку высокого разрешения для каждого экипажа на протяжении каждого вылета в открытый космос и собрать образцы, а также, возможно, возить космонавта в походах.
1
Для разгрузки и доставки массивных грузов, земных и лунных ресурсов будут использоваться скреперы. Для транспортировки, к примеру, крупного оборудования надо будет изменить форму скрепера. Так как он предназначен для руды, возможно, надо будет сделать его закрытым, создать специальные укрепления для груза, чтобы доставить его в сохранности. Для их транспортировки можно
использовать планетоходы, к примеру, Ровер-АТ. Планетоход должен быть оборудован манипулятором с универсальным захватным устройством, предназначенным для выполнения операций сцепления и расцепления скрепера с планетоходом, а также для выполнения прочих действий. Помимо манипулятора. Планетоход необходимо снабдить прямым отвалом – для выполнения дорожных работ. Также необходимы спускаемый аппарат (для мягкой посадки оборудования) и разгонный блок (для импульса спускаемому аппарату, выведенному на околоземную орбиту). Для доставки оборудования на Луну понадобится ракета – к примеру, Ангара-А5В.
Ангара А5 – строение и основные характеристики
Для возведения напланетной космической инфраструктуры:
2
Для начала надо будет разровнять поверхность. Также в процессе будет добыт реголит – ценный материал, из которого можно выгодно получать гелий-3. Для этого надо будет доставить 3 обычных (не переоборудованных для транспортировки оборудования) скрепера и один планетоход. На размеченном для разработки участке (кольцевой либо эллиптической формы) на месте прохождения скреперов образуется разровненная и уплотненная площадка – задел для дальнейшего строительства объектов Лунной базы.
Сама база будет построена из реголита, прямо на поверхности Луны, так что везти с Земли стройматериалы не требуется. Однако, полученный реголит необходимо превратить в эти самые стройматериалы, так что потребуется солнечный принтер, который за счёт энергии Солнца будет спрессовывать сырьё в стройматериалы. Один из таких – разработка Самарских учёных «Селенолит». Проект предполагает использование двух отдельных модулей на колесном шасси: первый (гелиолитограф) оснащен четырьмя зеркалами и отвечает непосредственно за 3D-печать, а второй (манипулятор) подвозит сырье и складирует готовые строительные блоки для дальнейшего использования. Схема его запуска такая же, как и у скреперов.
Селенолит
Сама база строится с помощью манипулятора-планетохода. Формируются опорные колонны базы, на базе которых строятся тоннели, засыпанные реголитом. Затем солнечный принтер извлекается, а планетоход убирает реголит под сводами тоннелей в пространство между тоннелями. Формируются пандусы для заезда принтера, который будет формировать новые стройматериалы для центральной арки строения, и планетохода, который будет её формировать. По окончании строительства всю технику транспортировать обратно на Землю не надо: она остаётся под сводами сооружения.
Для создания и поддержания
3
R5 Valkyrie — антропоморфный робот для использования в космосе, на Луне, на Марсе. 1.8 м, 131.5 кг. С двумя ногами и возможностью хождения. Два манипулятора в виде рук. Предназначен для использования на борту космического аппарата. Телеуправляемый. Разрабатывается с 2013 года или ранее.
Поддержание инфраструктуры: к 2022 году будет готов робот «Испытатель», способный самостоятельно управлять космическим кораблем. Ранее проект имел название «Федерация». Первый беспилотный полет «Орла» запланирован на 2023 год с нового космодрома «Восточный». Первый полет пройдёт без стыковки с МКС, однако во время второго теста в 2024 году «Испытатель» совершит стыковку «Орла» с МКС. Первые пилотируемые полеты на новом корабле «Орел» пройдут в 2025 году. Разработчики «Испытателя» заявили о намерении использовать робота в дальнейших полетах на Луну и Марс.
С
К
С
О
О
С
К
О
м
С
у
С
п
О
2
м
С
К
С
О
О
С
м
С
К
С
О
О
С
м
С
К
С
О
О
С
м
С
К
С
О
О
С
м
С
К
С
а
О
у
м
С
2
С
О
1
2
0
С
К
С
О
О
С
м
Ф
С
2
Р
2
5
в
у
и
7
2
Р
0
5
у
у
С
Работы на Луне. Биобот. Разгрузка. Доставка
Для выполнения разгрузки/доставки указанных масс груза от места прилунения до Лунной Базы:
Каждого астронавта будет сопровождать «Биобот», который будет транспортировать
их систему жизнеобеспечения и расходные материалы, удлиненную катушку для шлангокабеля , а также роботизированные системы, способные контролировать положение и движение шлангокабеля. Космонавт будет подключен к роботу через шлангокабель, несущие только небольшую аварийную систему жизнеобеспечения с открытым контуром, аналогичную тем, которые содержатся в каждом PLSS. Роботизированная мобильная база будет спроектирована так, чтобы иметь возможность путешествовать везде, где может идти космонавт, а также будет полезна в качестве транспорта для инструментов EVA, научной аппаратуры и собранных образцов, а также, возможно, для перевозки астронавта на маршрутах. Такая система также будет значительным улучшением участия общественности в этих будущих исследовательских миссиях, поскольку роботизированные транспортные средства могут иметь камеры с высоким разрешением и средства связи с высокой пропускной способностью, чтобы обеспечить видеосъемку высокого разрешения для каждого экипажа на протяжении каждого вылета в открытый космос и собрать образцы, а также, возможно, возить космонавта в походах.
их систему жизнеобеспечения и расходные материалы, удлиненную катушку для шлангокабеля , а также роботизированные системы, способные контролировать положение и движение шлангокабеля. Космонавт будет подключен к роботу через шлангокабель, несущие только небольшую аварийную систему жизнеобеспечения с открытым контуром, аналогичную тем, которые содержатся в каждом PLSS. Роботизированная мобильная база будет спроектирована так, чтобы иметь возможность путешествовать везде, где может идти космонавт, а также будет полезна в качестве транспорта для инструментов EVA, научной аппаратуры и собранных образцов, а также, возможно, для перевозки астронавта на маршрутах. Такая система также будет значительным улучшением участия общественности в этих будущих исследовательских миссиях, поскольку роботизированные транспортные средства могут иметь камеры с высоким разрешением и средства связи с высокой пропускной способностью, чтобы обеспечить видеосъемку высокого разрешения для каждого экипажа на протяжении каждого вылета в открытый космос и собрать образцы, а также, возможно, возить космонавта в походах.
1
Для разгрузки и доставки массивных грузов, земных и лунных ресурсов будут использоваться скреперы. Для транспортировки, к примеру, крупного оборудования надо будет изменить форму скрепера. Так как он предназначен для руды, возможно, надо будет сделать его закрытым, создать специальные укрепления для груза, чтобы доставить его в сохранности. Для
их транспортировки можно использовать планетоходы, к примеру, Ровер-АТ. Планетоход должен быть оборудован манипулятором с универсальным захватным устройством, предназначенным для выполнения операций сцепления и расцепления скрепера с планетоходом, а также для выполнения прочих действий. Помимо манипулятора. Планетоход необходимо снабдить прямым отвалом – для выполнения дорожных работ. Также необходимы спускаемый аппарат (для мягкой посадки оборудования) и разгонный блок (для импульса спускаемому аппарату, выведенному на околоземную орбиту). Для доставки оборудования на Луну понадобится ракета –
к примеру, Ангара-А5В.
их транспортировки можно использовать планетоходы, к примеру, Ровер-АТ. Планетоход должен быть оборудован манипулятором с универсальным захватным устройством, предназначенным для выполнения операций сцепления и расцепления скрепера с планетоходом, а также для выполнения прочих действий. Помимо манипулятора. Планетоход необходимо снабдить прямым отвалом – для выполнения дорожных работ. Также необходимы спускаемый аппарат (для мягкой посадки оборудования) и разгонный блок (для импульса спускаемому аппарату, выведенному на околоземную орбиту). Для доставки оборудования на Луну понадобится ракета –
к примеру, Ангара-А5В.
Ангара А5 – строение и основные характеристики
Для возведения напланетной космической инфраструктуры:
2
Для начала надо будет разровнять поверхность. Также в процессе будет добыт реголит – ценный материал, из которого можно выгодно получать гелий-3. Для этого надо будет доставить 3 обычных (не переоборудованных для транспортировки оборудования) скрепера и один планетоход. На размеченном для разработки участке (кольцевой либо эллиптической формы) на месте прохождения скреперов образуется разровненная и уплотненная площадка – задел для дальнейшего строительства объектов Лунной базы.
Сама база будет построена из реголита, прямо
на поверхности Луны, так что везти с Земли стройматериалы не требуется. Однако, полученный реголит необходимо превратить в эти самые стройматериалы, так что потребуется солнечный принтер, который за счёт энергии Солнца будет спрессовывать сырьё в стройматериалы. Один из таких – разработка Самарских учёных «Селенолит». Проект предполагает использование двух отдельных модулей на колесном шасси: первый (гелиолитограф) оснащен четырьмя зеркалами
и отвечает непосредственно за 3D-печать, а второй (манипулятор) подвозит сырье и складирует готовые строительные блоки для дальнейшего использования. Схема его
запуска такая же, как и у скреперов.
на поверхности Луны, так что везти с Земли стройматериалы не требуется. Однако, полученный реголит необходимо превратить в эти самые стройматериалы, так что потребуется солнечный принтер, который за счёт энергии Солнца будет спрессовывать сырьё в стройматериалы. Один из таких – разработка Самарских учёных «Селенолит». Проект предполагает использование двух отдельных модулей на колесном шасси: первый (гелиолитограф) оснащен четырьмя зеркалами
и отвечает непосредственно за 3D-печать, а второй (манипулятор) подвозит сырье и складирует готовые строительные блоки для дальнейшего использования. Схема его
запуска такая же, как и у скреперов.
Селенолит
Сама база строится с помощью манипулятора-планетохода. Формируются опорные колонны базы, на базе которых строятся тоннели, засыпанные реголитом. Затем солнечный принтер извлекается, а планетоход убирает реголит под сводами тоннелей в пространство между тоннелями. Формируются пандусы для заезда принтера, который будет формировать новые стройматериалы для центральной арки строения, и планетохода, который будет её формировать. По окончании строительства всю технику транспортировать обратно на Землю не надо: она остаётся под сводами сооружения.
Для создания и поддержания
3
R5 Valkyrie — антропоморфный робот для использования в космосе, на Луне, на Марсе.
1.8 м, 131.5 кг. С двумя ногами и возможностью хождения. Два манипулятора в виде рук. Предназначен для использования на борту космического аппарата. Телеуправляемый. Разрабатывается с 2013 года или ранее.
1.8 м, 131.5 кг. С двумя ногами и возможностью хождения. Два манипулятора в виде рук. Предназначен для использования на борту космического аппарата. Телеуправляемый. Разрабатывается с 2013 года или ранее.
Поддержание инфраструктуры: к 2022 году
будет готов робот «Испытатель», способный самостоятельно управлять космическим
кораблем. Ранее проект имел название
«Федерация». Первый беспилотный полет
«Орла» запланирован на 2023 год с нового космодрома «Восточный». Первый полет
пройдёт без стыковки с МКС, однако во время второго теста в 2024 году «Испытатель» совершит стыковку «Орла» с МКС. Первые пилотируемые полеты на новом корабле «Орел» пройдут в
2025 году. Разработчики «Испытателя» заявили
о намерении использовать робота в
дальнейших полетах на Луну и Марс.
будет готов робот «Испытатель», способный самостоятельно управлять космическим
кораблем. Ранее проект имел название
«Федерация». Первый беспилотный полет
«Орла» запланирован на 2023 год с нового космодрома «Восточный». Первый полет
пройдёт без стыковки с МКС, однако во время второго теста в 2024 году «Испытатель» совершит стыковку «Орла» с МКС. Первые пилотируемые полеты на новом корабле «Орел» пройдут в
2025 году. Разработчики «Испытателя» заявили
о намерении использовать робота в
дальнейших полетах на Луну и Марс.
С
К
С
О
О
С
К
О
м
С
у
С
п
О
2
м
С
К
С
О
О
С
м
С
К
С
О
О
С
м
С
К
С
О
О
С
м
С
К
С
О
О
С
м
С
К
С
а
О
у
м
С
2
С
О
1
2
0
С
К
С
О
О
С
м
Ф
С
2
Р
2
5
в
у
и
7
2
Р
0
5
у
у
С
Кто работал над проектом?
Ученики школы №309
- Анна ЖужневаКорреспондент
- Леся БусловаКорреспондент
- Григорий СоловьёвКорреспондент
- Эвелина ЧепуркоВерстальщица
- Виктория БушковскаяКуратор&эксперт
- Елена ФадееваКуратор